

| Traglast | 10 kg | |
| Reichweite | 1.300 mm | |
| Eigengewicht | 28,9 kg | |
| Achsenbewegung | Max. Geschwindigkeit | |
| Fuß | ± 360° | ± 120°/s |
| Schulter | ± 360° | ± 120°/s |
| Ellbogen | ± 360° | ± 180°/s |
| Handgelenk 1 | ± 360° | ± 180°/s |
| Handgelenk 2 | ± 360° | ± 180°/s |
| Handgelenk 3 | ± 360° | ± 180°/s |
| Eigenschaften | ||
| IP-Klassifikation | IP54 | |
| Umgebungstemperaturbereich | 0-50°C | |
| Feuchtigkeit | 90% RH (nicht kondensierend) | |
| Betriebsgeräusch | ~ 72 dB(A) | |
| Montageausrichtung | Boden, Decke, Wand | |
| Montagesäule | ||
| Maße | ||
| Breite (inkl. Füße) | 1.200 mm | |
| Höhe | 1.300 mm | |
| Durchmesser Säule | 220 mm | |
| Gewicht | 125 kg | |
| Eigenschaften | rollbar |

| Traglast | 20 kg | |
| Reichweite | 1.750 mm | |
| Eigengewicht inkl. Kabel | 64 kg | |
| Achsenbewegung | Max. Geschwindigkeit | |
| Fuß | ± 360° | ± 120°/s |
| Schulter | ± 360° | ± 120°/s |
| Ellbogen | ± 360° | ± 150°/s |
| Handgelenk 1 | ± 360° | ± 210°/s |
| Handgelenk 2 | ± 360° | ± 210°/s |
| Handgelenk 3 | ± 360° | ± 210°/s |
| Eigenschaften | ||
| IP-Klassifikation | IP54 | |
| Umgebungstemperaturbereich | 0-50°C | |
| Feuchtigkeit | 90% RH (nicht kondensierend) | |
| Betriebsgeräusch | ~ 65 dB(A) | |
| Montageausrichtung | Boden | |
| Montagesäule | ||
| Maße | ||
| Breite (inkl. Füße) | 1.200 mm | |
| Höhe | 1.300 mm | |
| Durchmesser Säule | 245 mm | |
| Gewicht | 125 kg | |
| Eigenschaften | feststehend |

| Traglast | 20 kg | |
| Reichweite | 1.700 mm | |
| Eigengewicht | 79 kg | |
| Achsenbewegung | Max. Geschwindigkeit | |
| Fuß | ± 360° | 100 °/s |
| Schulter | ± 125° | 80 °/s |
| Ellbogen | ± 160° | 100 °/s |
| Handgelenk 1 | ± 360° | 180 °/s |
| Handgelenk 2 | ± 360° | 180 °/s |
| Handgelenk 3 | ± 360° | 180 °/s |
| Eigenschaften | ||
| IP-Klassifikation | IP 54 | |
| Umgebungstemperaturbereich | 0-45 °C | |
| Betriebsgeräusch | ~ 40 dB | |
| Montageausrichtung | Boden | |
| Montagesäule | ||
| Maße | ||
| Breite (inkl. Füße) | 1.306 mm | |
| Höhe | 1.300 mm | |
| Durchmesser Säule | 300 mm | |
| Gewicht | 125 kg | |
| Eigenschaften | feststehend | |

- maximale Nutzlast von 15 kg
- Eigengewicht von 6,1 kg
- max. Geschwindigkeit bis zu 100°/Sek.
- 350° Schwenkbereich
- Abmessungen 320 x 268 x 156 mm
- CamBot optimiert

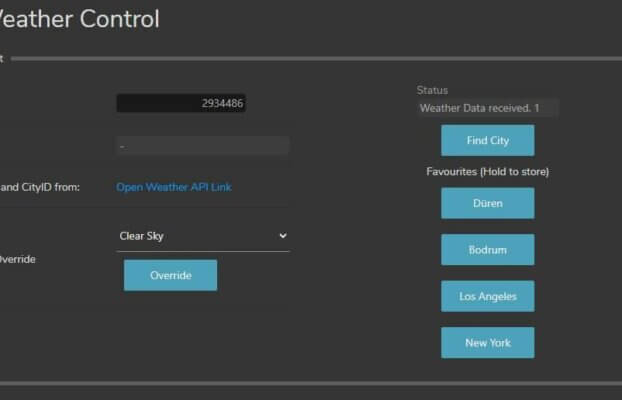
KST Weather Control Module für Zero Density’s RealityHub
21. März 2023Das KST-Entwickler-Team hat kürzlich das “KST-Weather-Control-Module” fertig gestellt. Es ist eine Schnittstelle für Zero Density’s RealityHub und kann per API eingebunden werden. Das Wetter-Modul lädt automatisch das aktuelle Wetter der im Menü ausgewählten Stadt und simuliert es in der virtuellen...

ISE 2023 – Komplettes IP-Studio innerhalb weniger Tage?
7. Februar 2023Geht. KST Moschkau hat es als Partner von Panasonic für deren ISE-Stand in Barcelona umgesetzt. Während der AV-Messe ISE in Barcelona zeigte Panasonic mit einem kompletten IP-Studio am Stand das derzeitige Line-Up von Panasonic zu diesem Thema. KST Moschkau baute dieses Studio als Partner...

IBC 2022 – Virtuelle Studioproduktions-Automatisierung
8. September 2022KST Moschkau zeigte am Stand von Zero Density, wie weit man Produktionen in virtuellen Studios mit Reality, CamBot®-Systemen und Kairos automatisieren kann. Als Partner am Stand von Zero Density gab das KST-CamBot®-Team in täglichen Shows und über 100 Einzelvorführungen am...